CAN
CAN/CAN-FD is an industry-standard vehicle bus protocol designed for reliable ECU communication in automotive applications.
IMPORTANT
Some features described in this section may require a CAN DBC file. For more information about DBC files, please refer to our database documentation.
Supported Hardware:
| Manufacturer | Protocols |
|---|---|
| PEAK | CAN, CAN-FD |
| KVASER | CAN, CAN-FD |
| ZLG | CAN, CAN-FD |
| Toomoss | CAN, CAN-FD |
| VECTOR | CAN, CAN-FD |
| SLCAN | CAN, CAN-FD |
SLCAN Special
SLCAN is a low-cost open-source solution, with firmware sourced from canable-fw, and communication based on USB-ACM.
NOTE
This firmware currently does not provide any ACK/NACK feedback for serial commands.
GS_USB
Windows/Linux/Mac CAN driver based on usbfs or WinUSB WCID for Geschwister Schneider USB/CAN devices and candleLight USB CAN interfaces.
Linux gs_usb
Linux kernels 3.7 and above have merged the gs_usb driver. Check if the gs_usb module is enabled using
lsmod | grep gs_usbIf it's not loaded, use
sudo modprobe gs_usbTo remove it, use
sudo rmmod gs_usbConfigure automatic loading at startup:
echo "gs_usb" | sudo tee /etc/modules-load.d/gs_usb.confNon-root users require corresponding user group membership.
Use devadm to monitor device connections and obtain the precise device path:
sudo devadm monitor --propertyCheck the device group ownership. Assuming ttyUSB0 (actual device may vary):
stat -c "%G" /dev/ttyUSB0- Arch Linux: Should return
uucp
sudo usermod -aG uucp $USER
newgrp uucp- Debian/Ubuntu: Should return
dialout - Fedora/RHEL: Should return
dialout
sudo usermod -aG dialout $USER
newgrp dialoutDevice Configuration
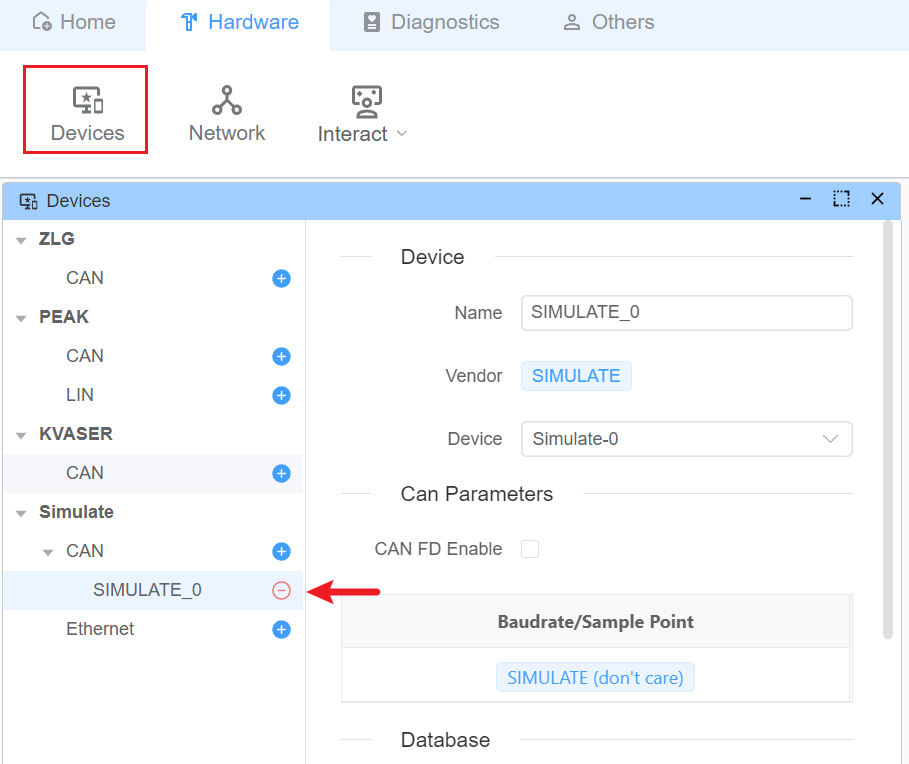
For demonstration purposes, we'll use a simulated device. You can configure the baud rate and sample point in the device settings.
Baud Rate Setting
The baud rate setting is used to configure the baud rate of the CAN bus.
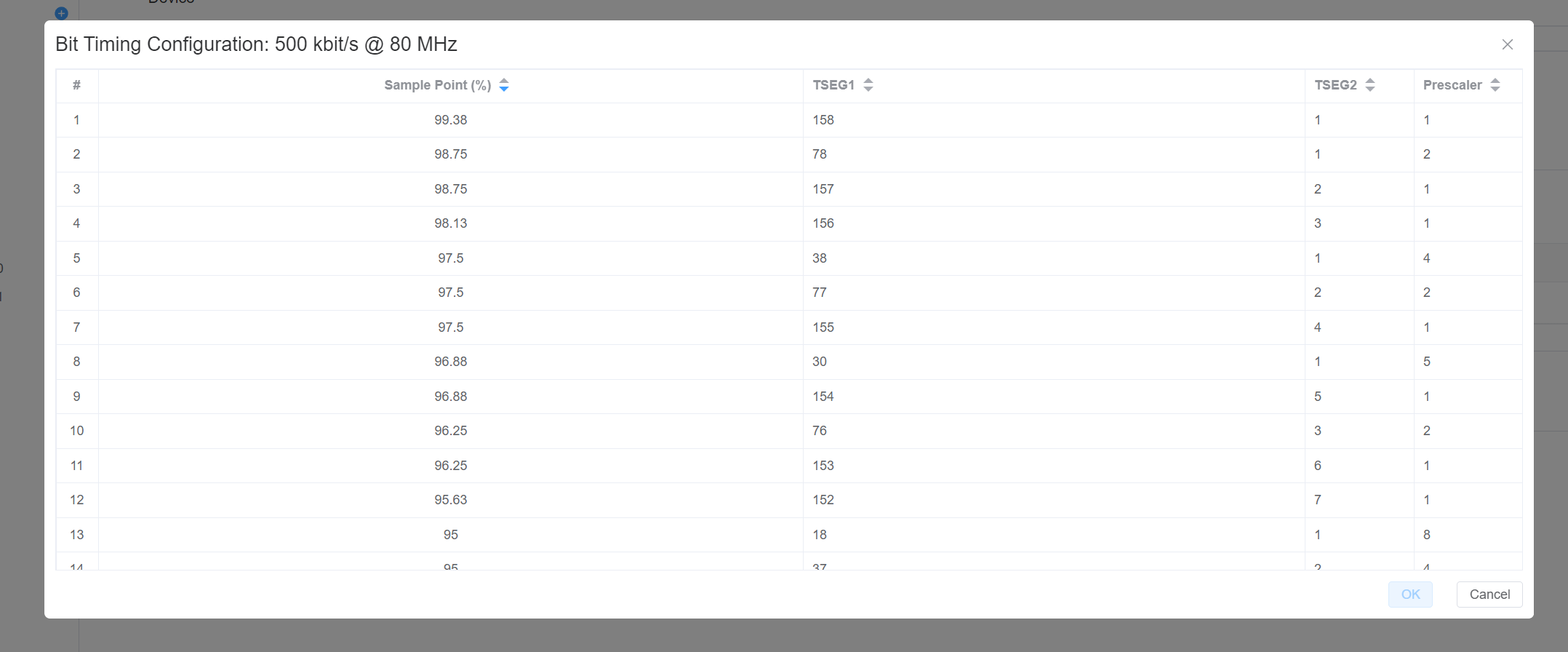
Click the Bit Timing button to open the bit timing configuration window. 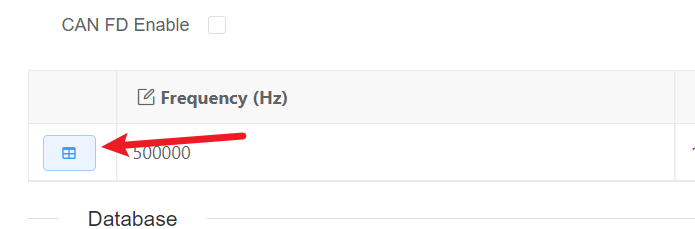
Interactive Mode and Node Scripts
EcuBus-Pro offers two primary methods for CAN communication:
- Interactive Mode: For manual frame transmission
- Node Scripts: For automated communication using custom scripts
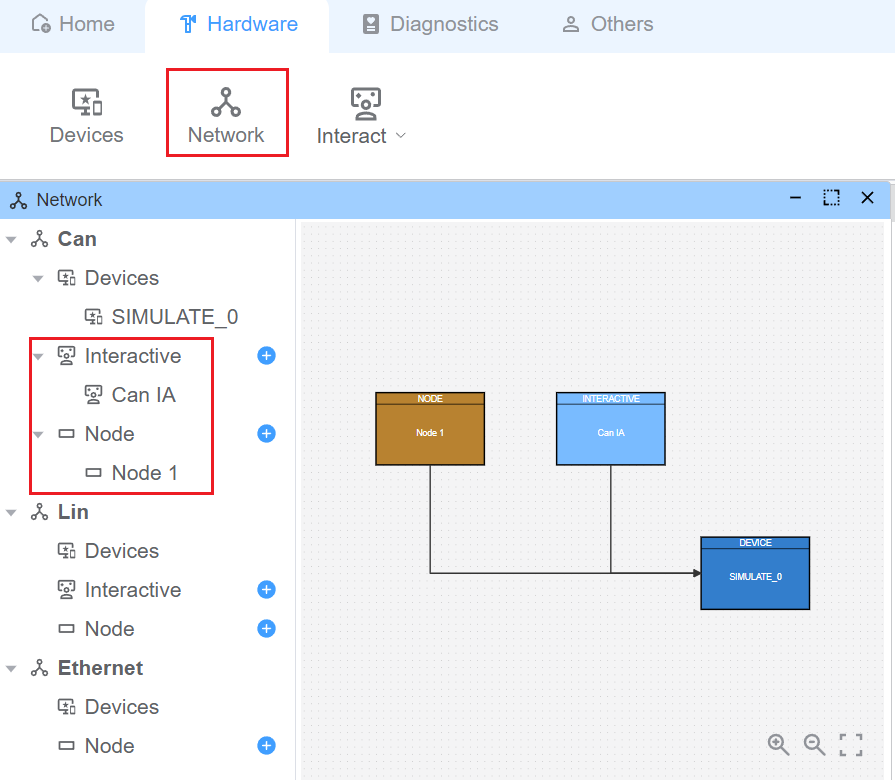
Interactive Mode
Each frame can be configured for periodic transmission or manual triggering (single-shot or key-bound). 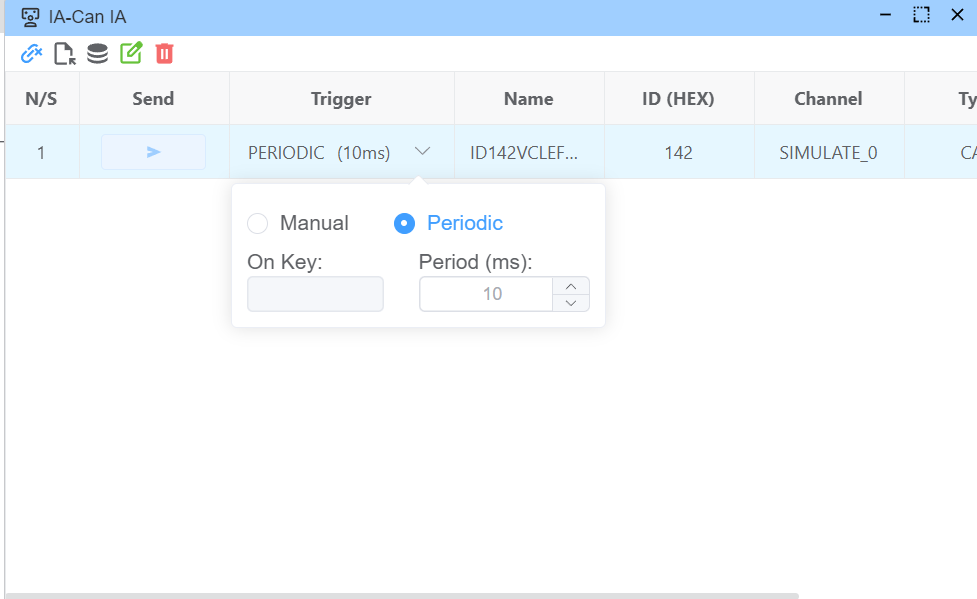
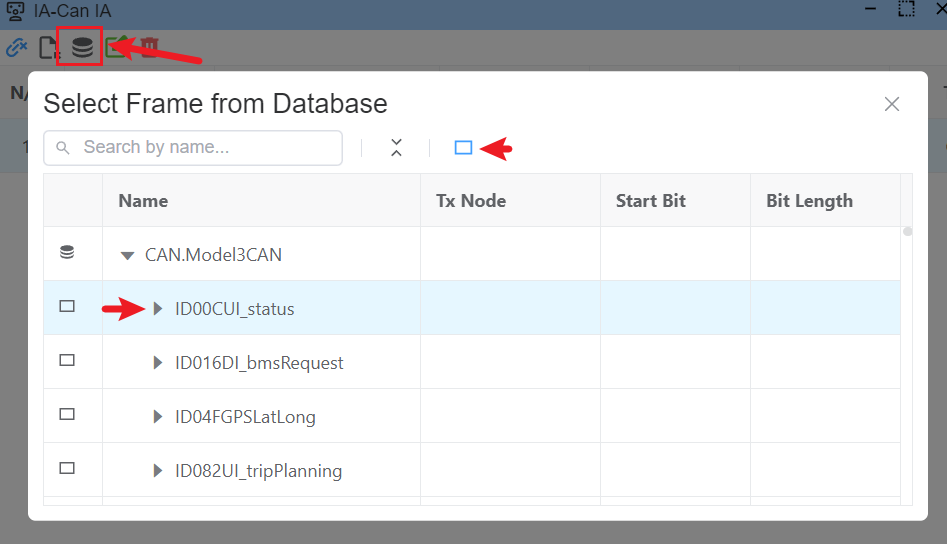
You can add frames in two ways:
- Manual frame configuration
- Import from DBC database
Node Scripts
Nodes can be configured with UDS capabilities (tester) and custom scripts. 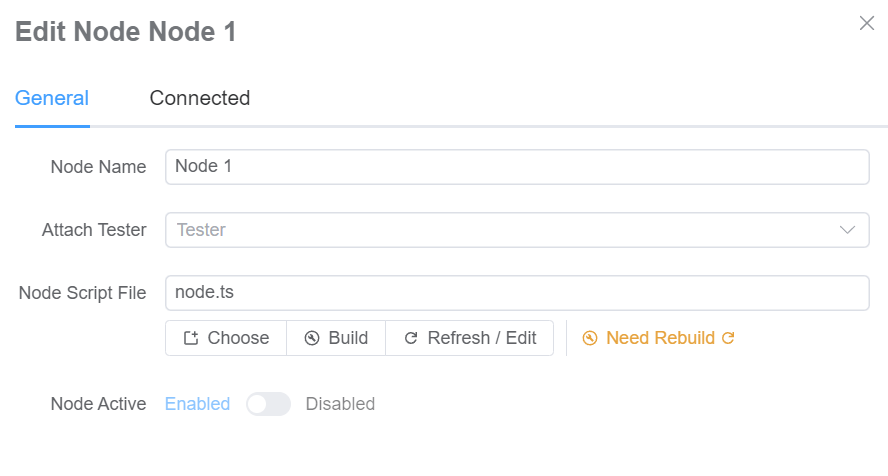
Example script for periodic signal updates:
import { setSignal } from 'ECB'
let val = 0
// Update signal value every second
setInterval(() => {
setSignal('Model3CAN.VCLEFT_liftgateLatchRequest', val++ % 5)
}, 1000)Diagnostic Operations
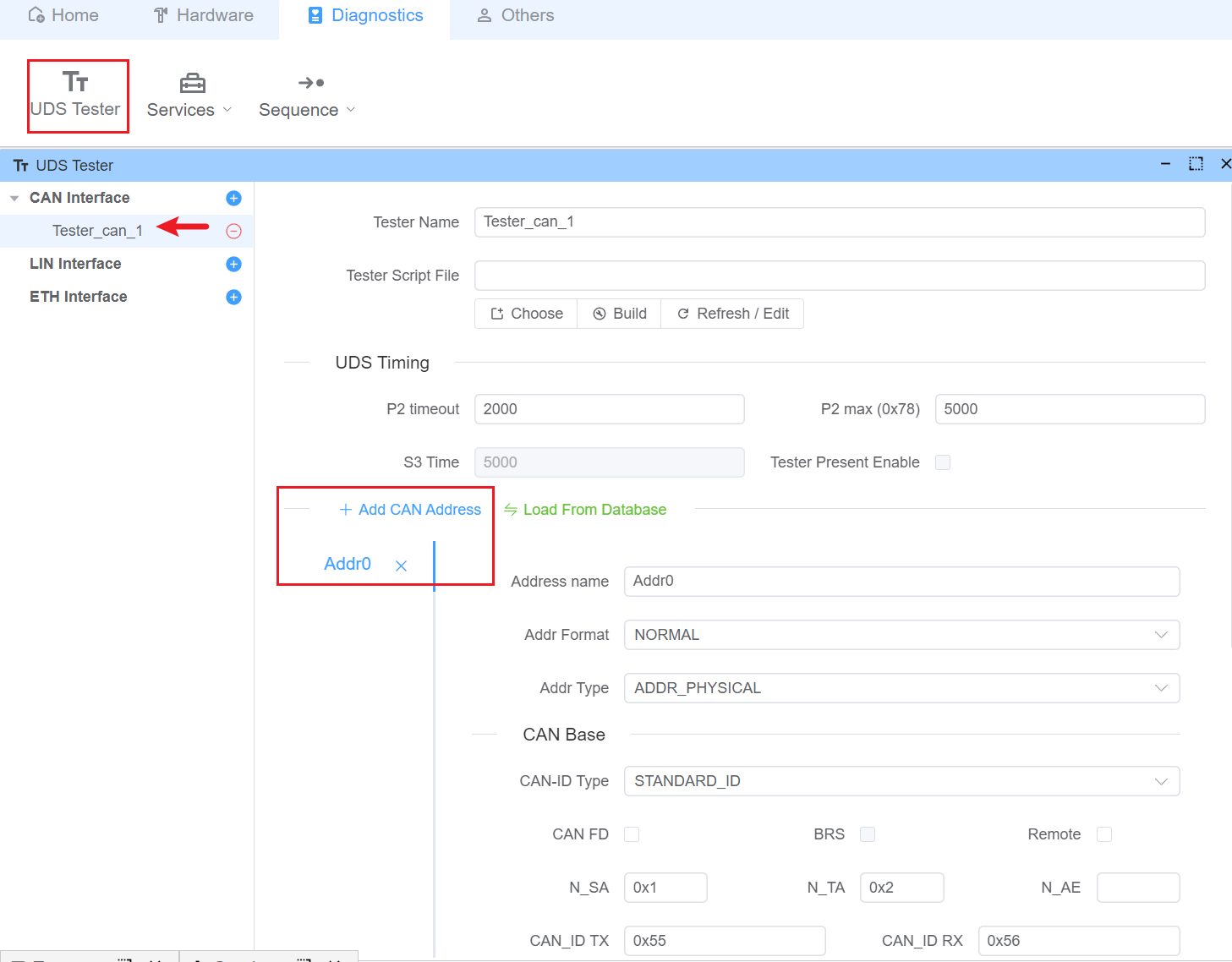
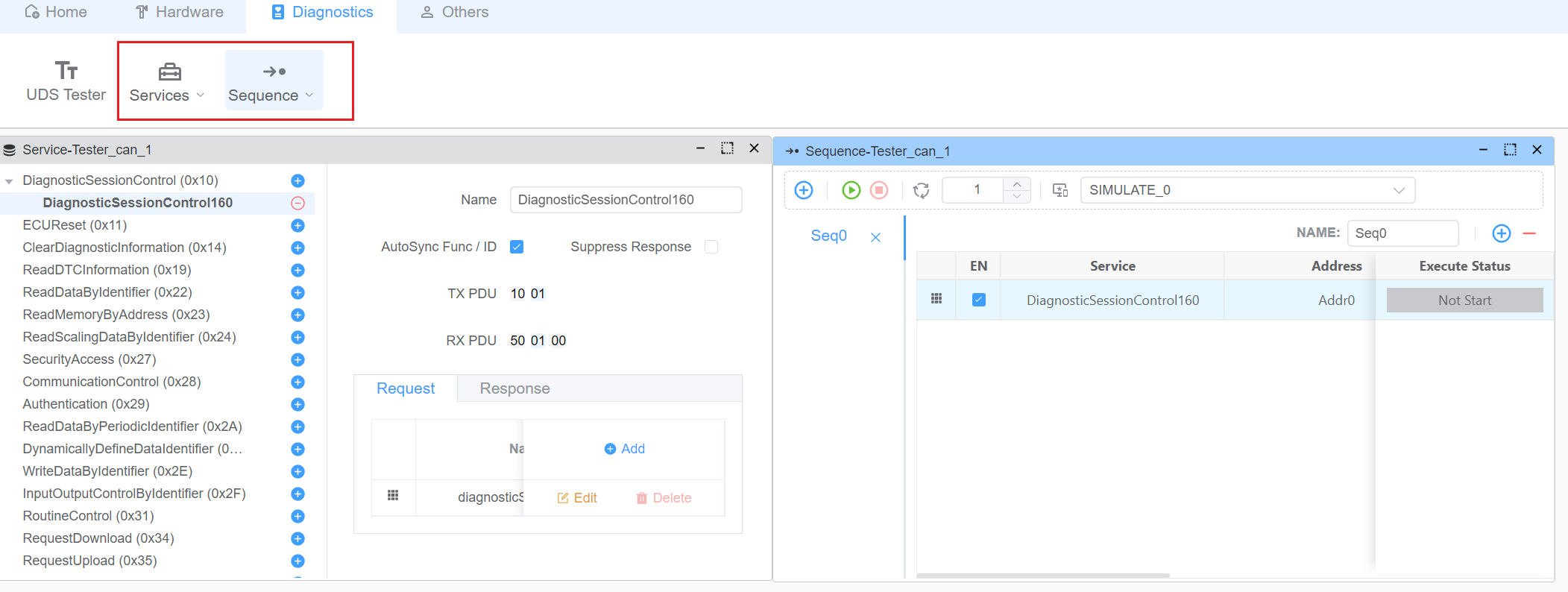
Tester Configuration
- Configure addressing
- Set diagnostic parameters
Diagnostic Services
- Configure diagnostic services
- Create schedule tables and sequences
Message Monitoring
- View transmitted and received messages in the trace window
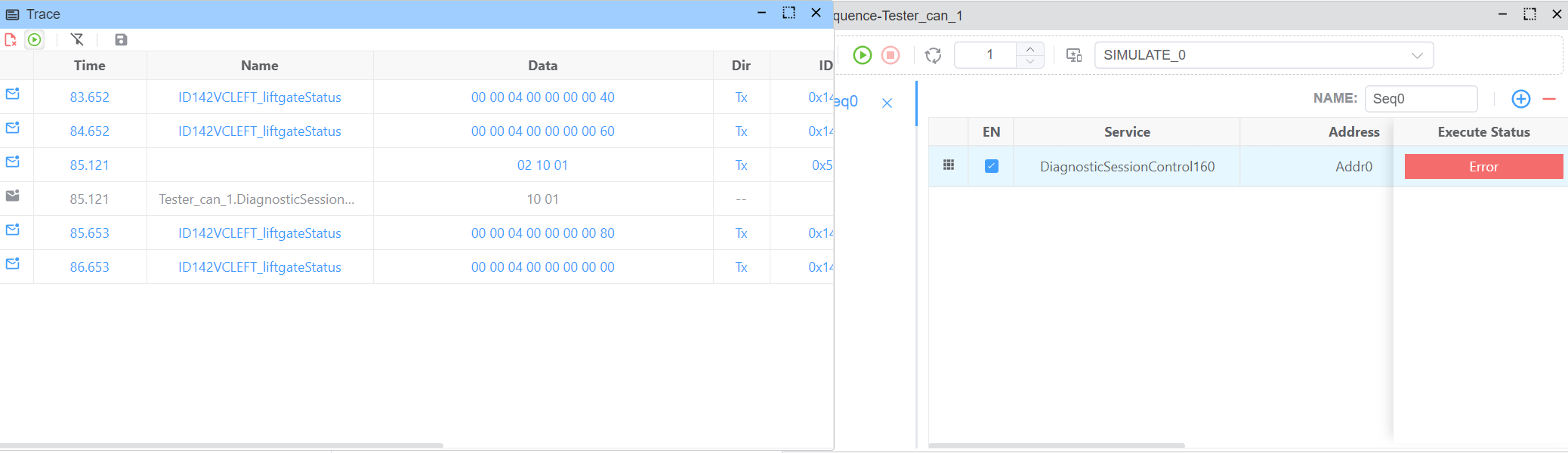
- View transmitted and received messages in the trace window