CAN
CAN/CAN-FD 是一种行业标准的车辆总线协议,专为汽车应用中可靠的ECU通信而设计。
IMPORTANT
本节描述的某些功能可能需要CAN DBC文件。 有关DBC文件的更多信息,请参阅我们的数据库文档。
支持的硬件:
| 制造商 | 协议 |
|---|---|
| PEAK | CAN, CAN-FD |
| KVASER | CAN, CAN-FD |
| ZLG | CAN, CAN-FD |
| Toomoss | CAN, CAN-FD |
| VECTOR | CAN, CAN-FD |
| SLCAN | CAN, CAN-FD |
SLCAN 特殊说明
SLCAN 是一种低成本开源解决方案,固件来源于 canable-fw,通信基于 USB-ACM。
NOTE
此固件目前不提供任何串行命令的 ACK/NACK 反馈。
GS_USB
基于 usbfs 或 WinUSB WCID 的 Windows/Linux/Mac CAN 驱动程序,适用于 Geschwister Schneider USB/CAN 设备和 candleLight USB CAN 接口。
Linux gs_usb
Linux 内核 3.7 及以上版本已合并 gs_usb 驱动程序。 使用以下命令检查 gs_usb 模块是否启用:
bash
lsmod | grep gs_usb如果未加载,请使用
bash
sudo modprobe gs_usb要移除它,请使用
bash
sudo rmmod gs_usb配置启动时自动加载:
bash
echo "gs_usb" | sudo tee /etc/modules-load.d/gs_usb.conf非 root 用户需要相应的用户组成员资格。
使用 devadm 监控设备连接并获取精确的设备路径:
bash
sudo devadm monitor --property检查设备组所有权。 假设为 ttyUSB0(实际设备可能不同):
bash
stat -c "%G" /dev/ttyUSB0- Arch Linux:应返回
uucp
bash
sudo usermod -aG uucp $USER
newgrp uucp- Debian/Ubuntu:应返回
dialout - Fedora/RHEL:应返回
dialout
bash
sudo usermod -aG dialout $USER
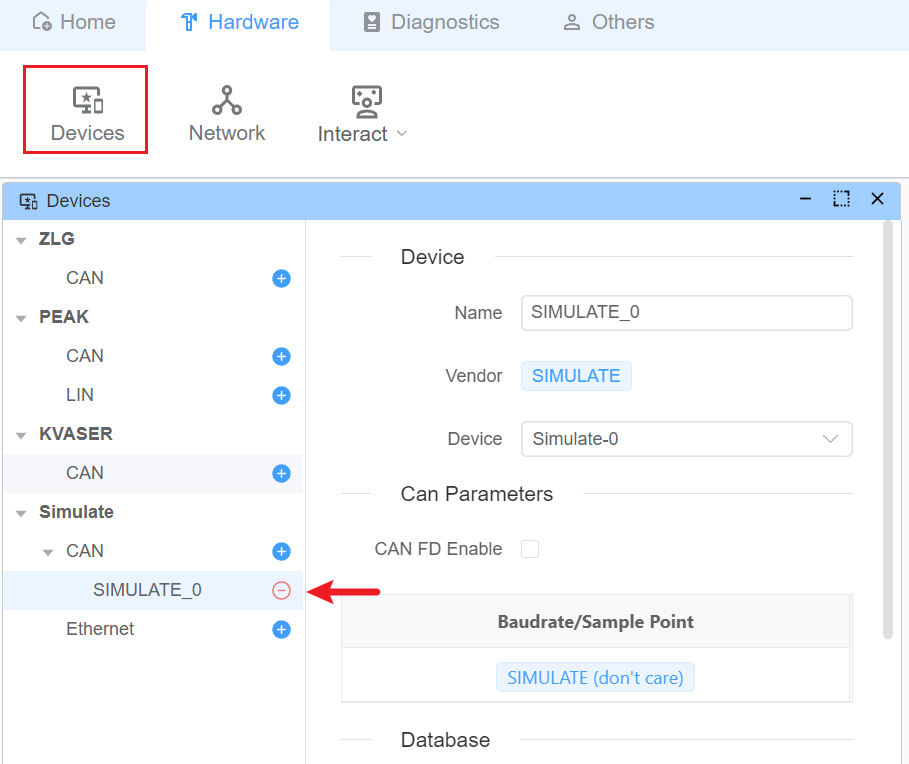
newgrp dialout设备配置
出于演示目的,我们将使用模拟设备。 您可以在设备设置中配置波特率和采样点。
波特率设置
波特率设置用于配置 CAN 总线的波特率。
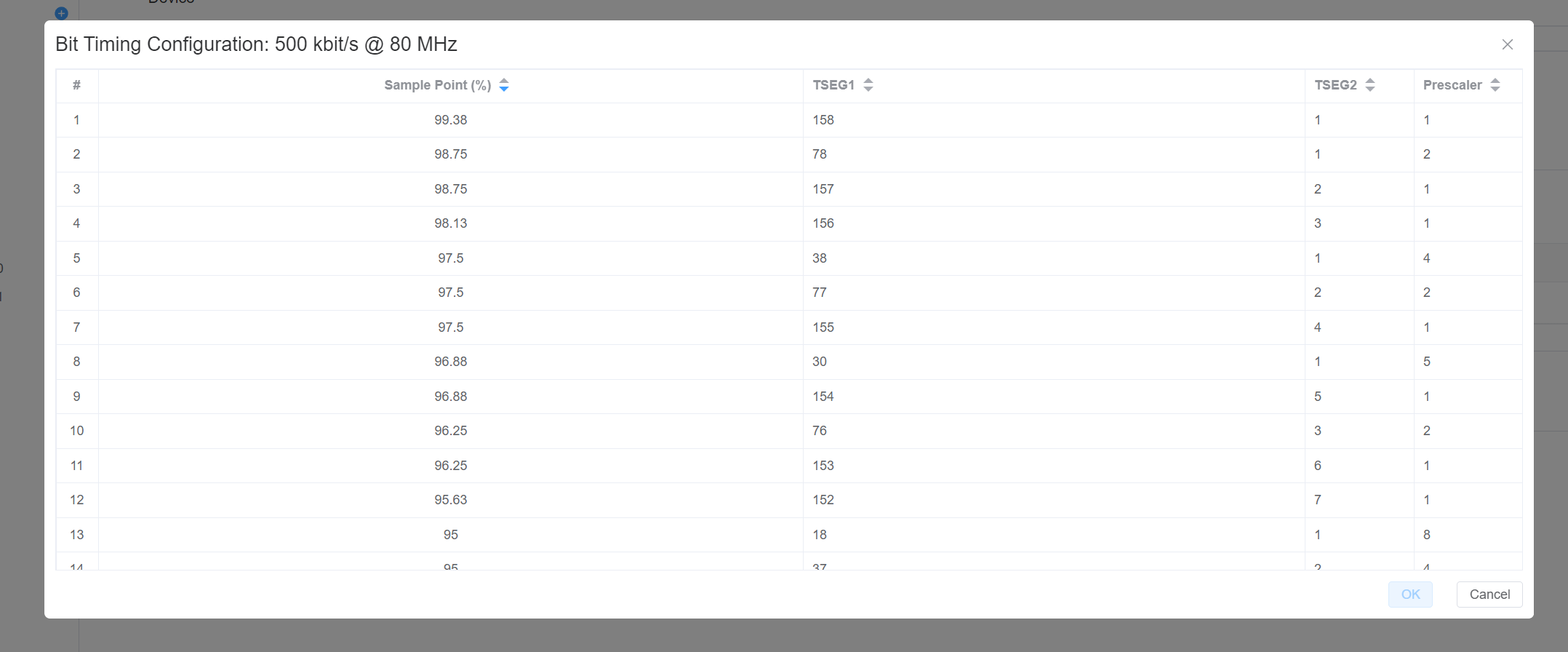
点击 Bit Timing 按钮打开位时序配置窗口。 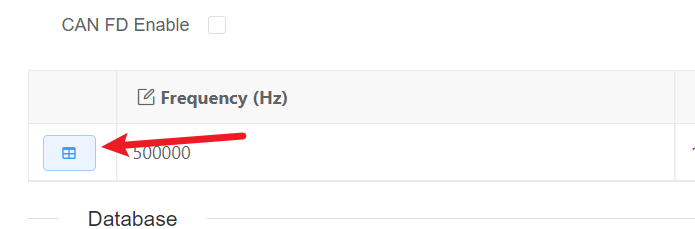
交互模式和节点脚本
EcuBus-Pro 提供两种主要的 CAN 通信方法:
- 交互模式:用于手动帧传输
- 节点脚本:用于使用自定义脚本进行自动化通信
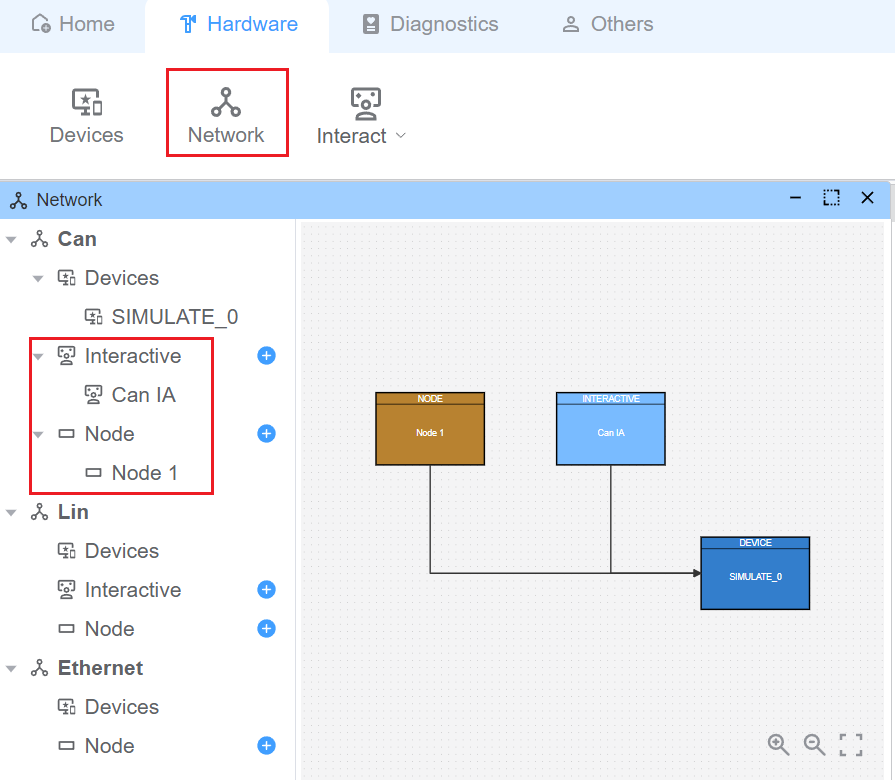
交互模式
每个帧可以配置为周期性传输或手动触发(单次触发或按键绑定)。 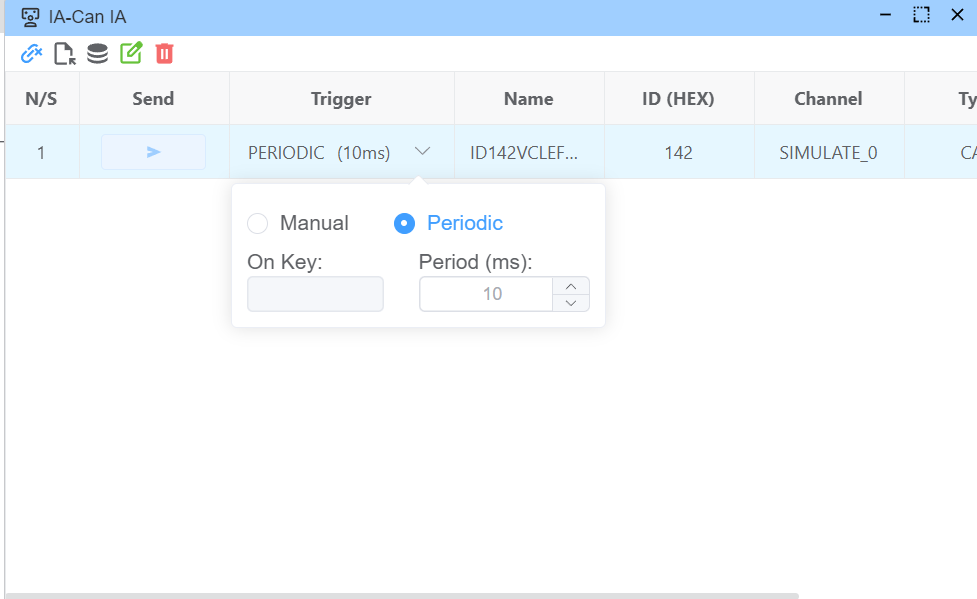
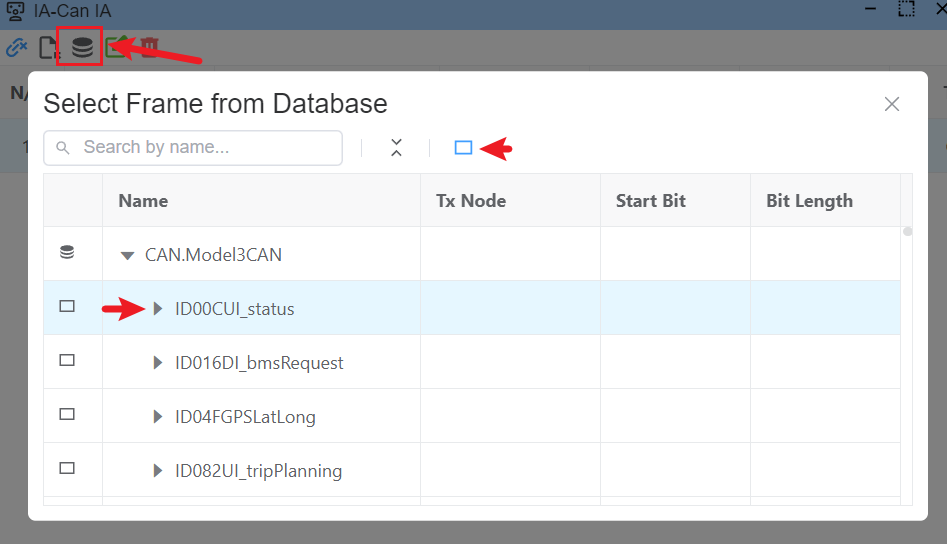
您可以通过两种方式添加帧:
- 手动帧配置
- 从 DBC 数据库导入
节点脚本
节点可以配置 UDS 功能(测试器)和自定义脚本。 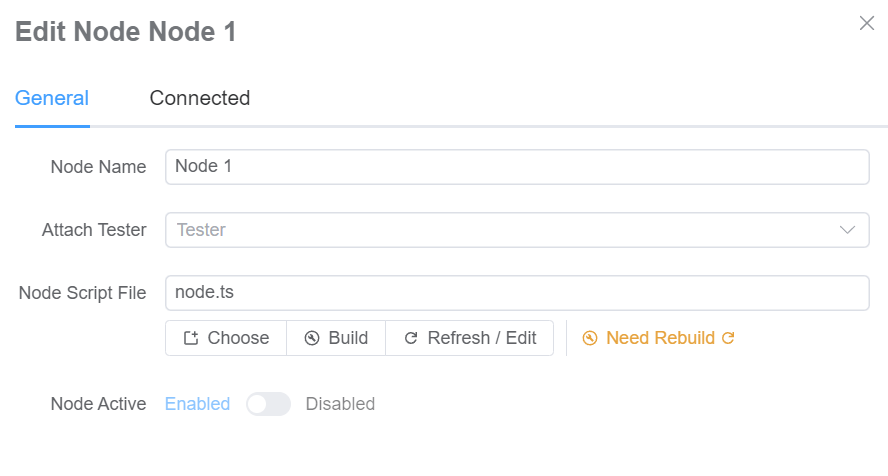
周期性信号更新的示例脚本:
typescript
import { setSignal } from 'ECB'
let val = 0
// Update signal value every second
setInterval(() => {
setSignal('Model3CAN.VCLEFT_liftgateLatchRequest', val++ % 5)
}, 1000)诊断操作
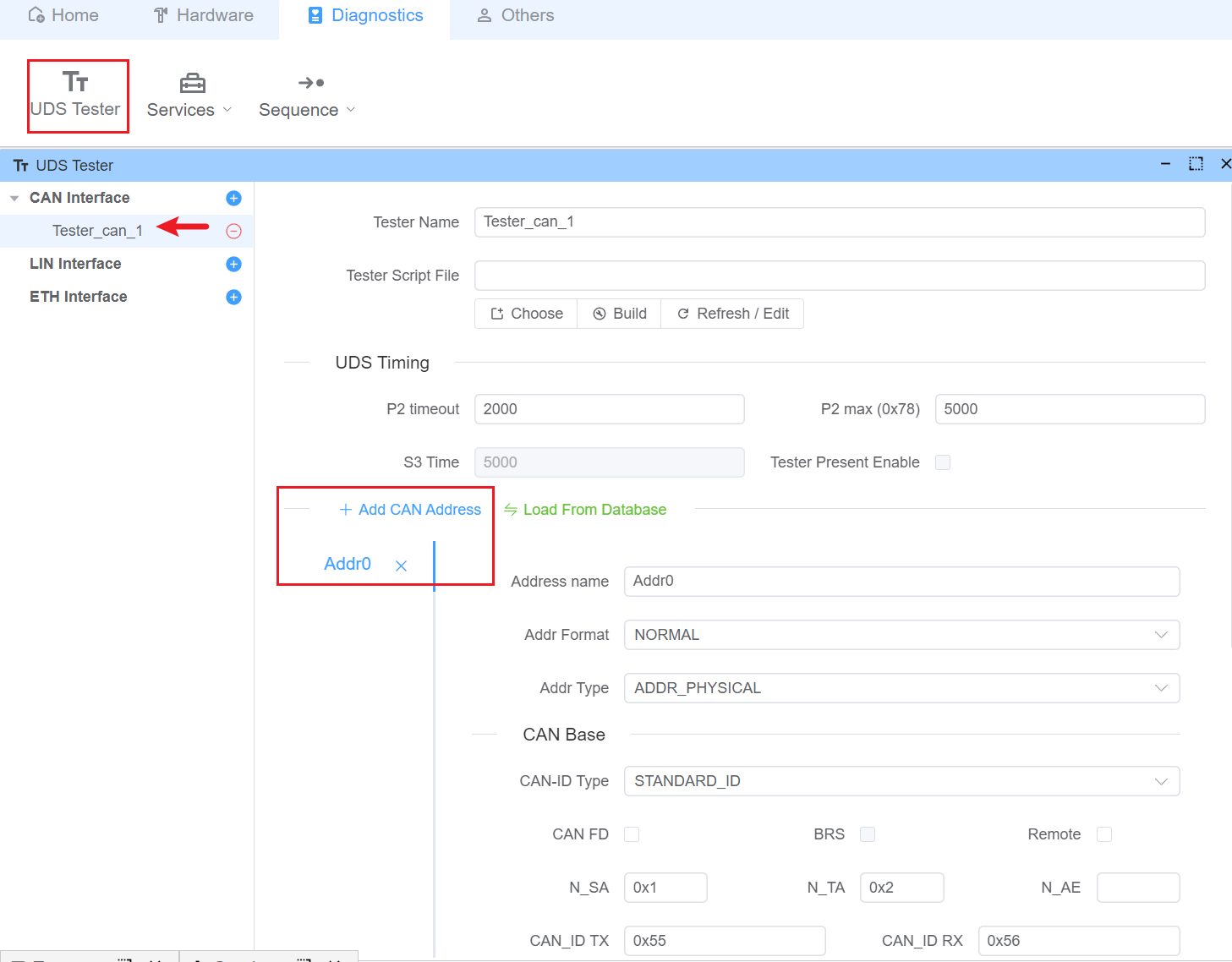
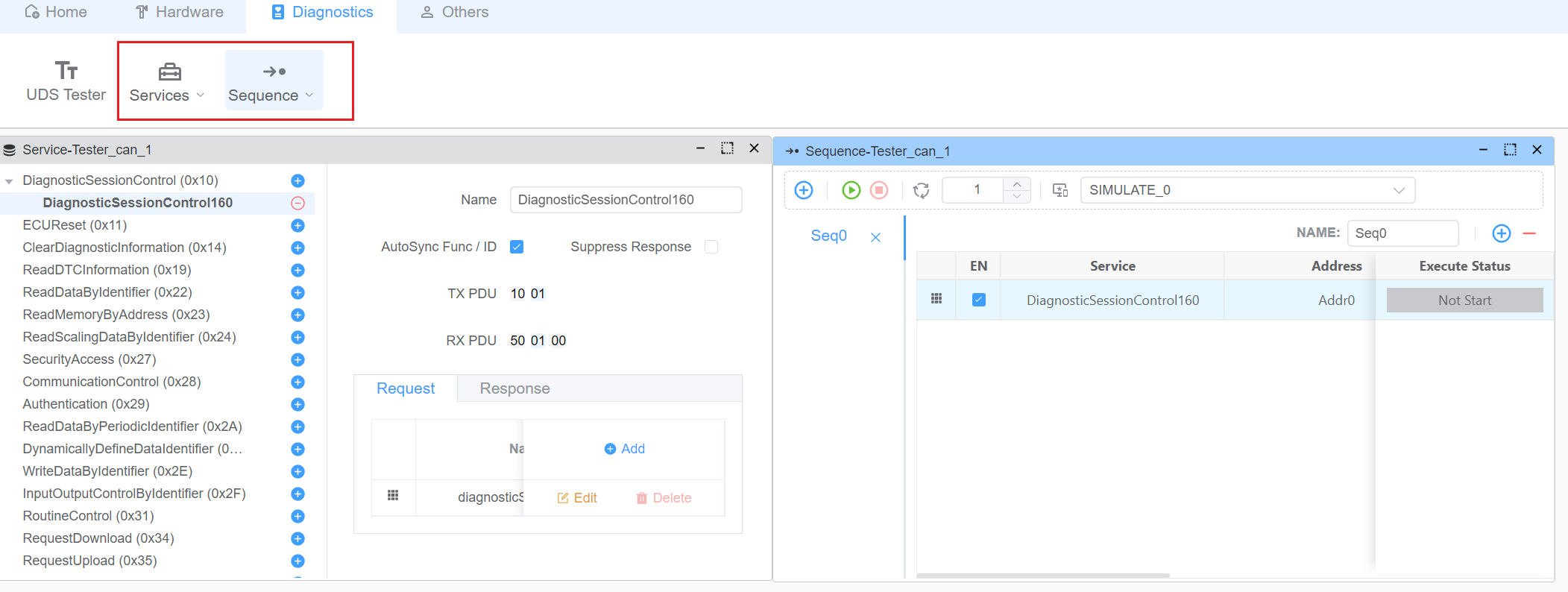
测试器配置
- 配置寻址
- 设置诊断参数
诊断服务
- 配置诊断服务
- 创建调度表和序列
消息监控
- 在跟踪窗口中查看发送和接收的消息
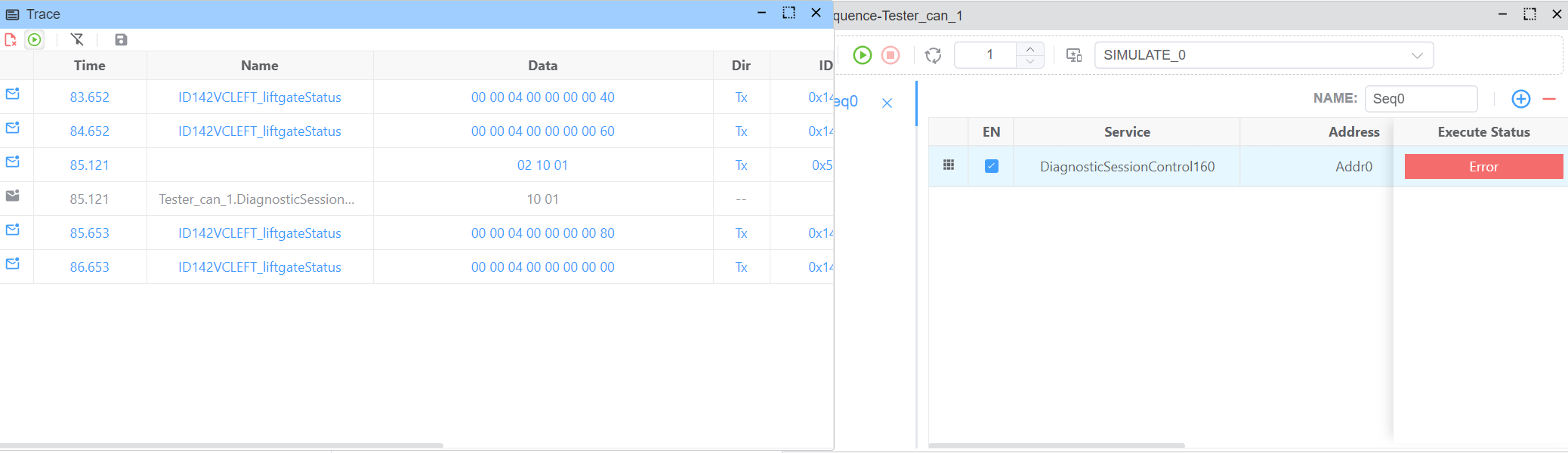
- 在跟踪窗口中查看发送和接收的消息