CANopen PDO 示例
概述
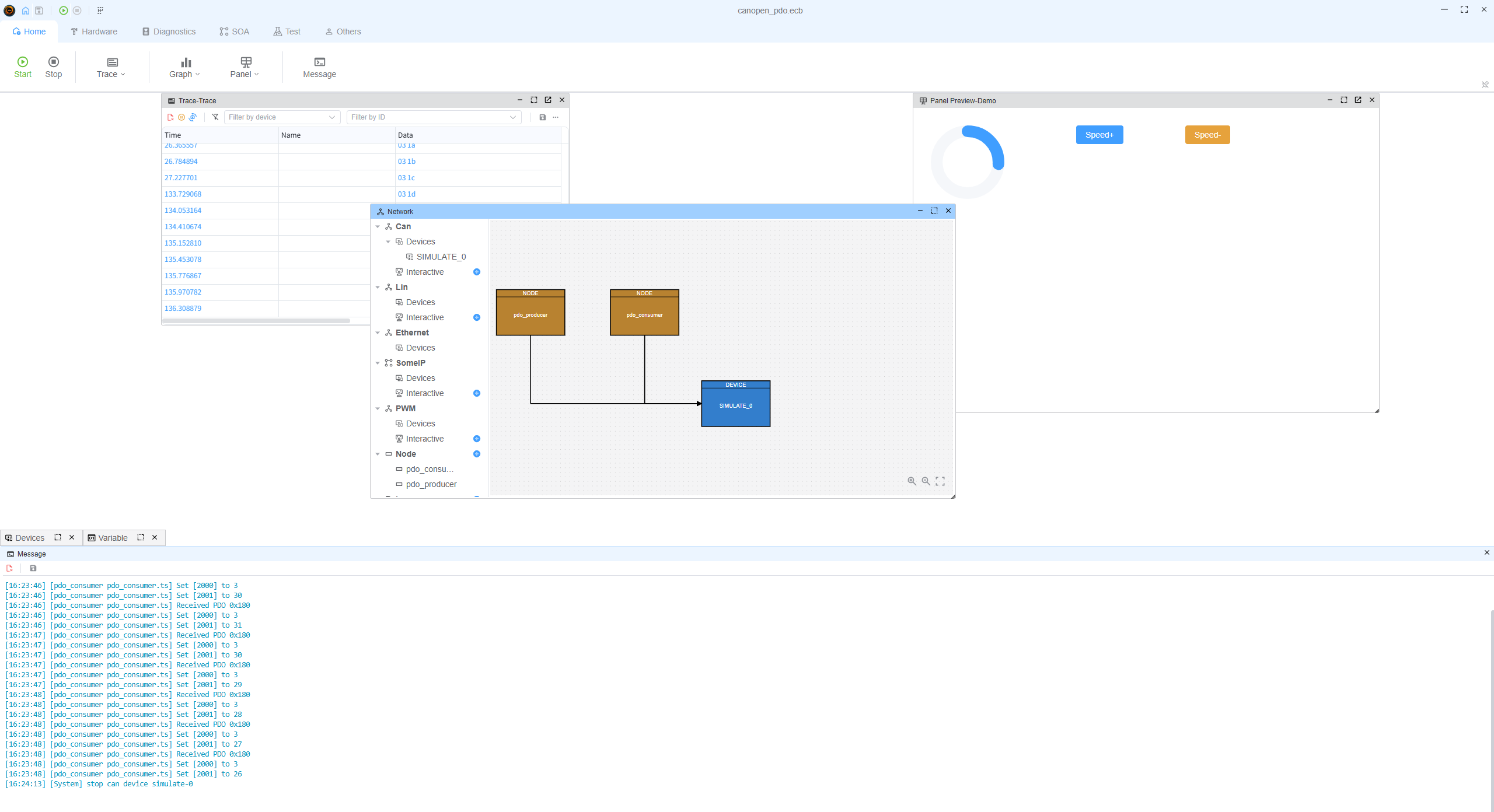
本示例展示了单 CAN 通道上的过程数据对象 (PDO):一个脚本在对象字典值发生变化时发送一个 TPDO,另一个脚本接收该帧作为 RPDO 并打印解码后的映射。
与 SDO 相比,PDO 通信开销低,适用于周期性或事件驱动的过程数据。 此处两个节点都连接到 canopen_pdo.ecb 中定义的同一模拟 CAN 设备(SIMULATE_0,500 kbit/s)。
项目结构
| 文件 | 角色 |
|---|---|
canopen_pdo.ecb | 包含一个 CAN 设备上两个脚本节点的 ECUBUS 项目 |
pdo_producer.ts | CANopen 设备(节点 ID 0xB),在 COB-ID 0x180 上有一个 TPDO,映射 0x2000(计数器)+ 0x2001(电机转速,0-100) |
pdo_consumer.ts | 独立脚本实例中的相同节点 ID,在 0x180 上有一个 RPDO,映射到 0x2000 + 0x2001 |
每个脚本通过 Util.OnCan → device.receive(...) 将协议栈连接到总线,并通过 device.addListener('message', ...) → output(...) 转发协议栈的发送。
生产者 (pdo_producer.ts)
- 添加对象
0x2000(8 位无符号测试值)和0x2001(电机转速,0-100)。 - 声明一个发送 PDO,其
transmissionType: 254(映射值变化时发送),COB-ID0x180,有效载荷来自0x2000+0x2001。 - 调用
device.start()和device.nmt.startNode()以使设备进入运行状态。 - 每 100 毫秒将
0x2000递增三次(1 -> 2 -> 3),这会触发 TPDO 发送。 - 转速(
0x2001)由面板变量控制:MotorSpeedPlus:将转速增加 1(限制在100)MotorSpeedMinus:将转速减少 1(限制在0) 每次更改都会更新0x2001并触发 TPDO 的发送-变化。
消费者(pdo_consumer.ts)
- 添加对象
0x2000和0x2001,并在 COB-ID0x180上配置一个接收 PDO,映射到这两个对象。 - 在
start()/startNode()之后,通过device.pdo.on('pdo', ...)监听并记录 COB-ID 及每个映射对象的值。 - 当接收到对象
0x2001时,通过setVar("MotorSpeed", value)将其值写入全局变量MotorSpeed。
如何运行
- 在 ECUBUS Pro 中打开
canopen_pdo.ecb。 - 确保两个脚本(
pdo_producer、pdo_consumer)使用相同的 CAN 通道(如捆绑项目中所示)。 - 运行项目;观察消费者输出中带有两个映射值(计数器和速度)的
Received PDO行。 - 在面板中切换
MotorSpeedPlus/MotorSpeedMinus以改变速度,并观察消费者端同步的 PDO 更新。
更多示例
底层堆栈遵循常见的 CANopen PDO 模式。 更多独立场景(NMT、SDO、SYNC、TIME、LSS、EMCY 等)请参阅 node-canopen 示例: